On the Limits and the Potentials of the Humanoid Robot

Asli Kemiksiz (Osaka University)
Issue 5 (2019)
Abstract
Before developing into a category of technologies, the robot was an imagined figure in science fiction (SF). The gap between imaginary robots and their real-life counterparts creates a distinctive opportunity to examine how science fiction is embedded in technoscience and vice versa. This paper explores how materials of imagination––facts, fictions, beliefs, rationales, aesthetics, norms, etc.––shape emerging Japanese humanoid robots. Using Donna Haraway’s image of string figures to consider the intimate relations between SF, technoscience and science studies, I also identify and break down some powerful, conventional imaginaries—ranging from the companion robots to the Laws of Robotics—in order to elucidate how the Japanese humanoid robot came to be what it is. I end by arguing that science fiction thought experiments provide materials of imagination with potentials for opening up current robotics to imaginaries beyond current experimental systems.
Introduction
The word “robot” refers to multiple, entangled entities. Originally, it was an artificial laborer in the play Rossum’s Universal Robots ([1920] 2014) by Karel Čapek. It evolved into a science fiction figure, often depicted as a machine with various humanlike traits. Soon, real-life machines also dubbed robots appeared,[1] and while they did not exactly live up to their fictional counterparts, they did open the way to the techno-scientific discipline called robotics. Today, the robot has come to refer to a category of machines that are mostly programmable and have some degree of autonomy.[2] At the same time, the robot is a repository of imaginaries that designate an artificial Other that, as I suggest, also serves as a mirror for whoever is looking.
The ‘material-semiotic’ multiplicity of the robot has turned it into a rather peculiar object of study for the social sciences and humanities. The robot, it seems, simultaneously exists and does not quite exist. While the virtually-indistinguishable-from-human robots of science fiction (SF) do not exist, we do have an abundance of machines that are called robots. Furthermore, the figure of the robot can be said to exist in multiple temporalities, since it comes from the past and evokes hopes and fears far beyond the capacities of any present-day machine. The liminal aspect of the robot, as a humanlike machine, is both pervasive and effective: both material and hypothetical-imagined robots are often used by people to reevaluate understandings of significant concepts, including ‘human’, ‘life’, ‘intelligence’, etc.
The implication is that robots interweave matter and imaginations. Or, said differently, numerous practices, contexts, and imaginaries contingently converge in the figure of the robot. Imaginaries, of course, have been important for the anthropology of science and technology. McNeil et al. (2016) track their conceptual genealogies in STS and identify four central resources: from the Western philosophical tradition, from psychoanalysis, from late twentieth century sociopolitical theory and—from science fiction.
The “imagined communities” developed by the political scientist Benedict Anderson (1991) and the anthropologist Arjun Appadurai’s (1996) global flows have been pivotal for the sociological and anthropological studies of imagination.[3] Close to STS, George E. Marcus’ Technoscientific Imaginaries characterized imaginaries as “structures of contingency” (1995, 4). In conversation with imagined communities and the philosopher Charles Taylor’s depiction of social imaginaries of “the whole society,” Sheila Jasanoff and Sang-Hyun Kim’s (2009, 120) defined “sociotechnical imaginaries” as “collectively imagined forms of social life and social order reflected in the design and fulfillment of nation-specific scientific and/or technological projects.” Later, they loosened the idea of nation-specificity, and enlarged the concept to refer to “collectively held, institutionally stabilized, and publicly performed visions of desirable futures, animated by shared understandings of forms of social life and social order attainable through, and supportive of, advances in science and technology” (Jasanoff and Kim 2015, 4).
The notion of imaginaries as “structures of contingency” and as “collectively imagined” forms socially embedded in technological projects are both relevant for the present study. Even more important, however, is the fourth area to which McNeil et al. brought attention: science fiction. Donna Haraway has been at the forefront here, simultaneously imagining and exemplifying what science andSTS could be if channeled through SF. While Technoscientific Imaginaries centered on the imaginations of scientists, and Jasanoff and Kim broadened the scope of imaginaries to encompass collective and public performances, Haraway (1991) more radically read primatology as science fiction. Not only did her pathbreaking “Cyborg Manifesto” offer a novel theorization of politics, gender, and technoscience; it was also, provocatively, itself a potent piece of science fiction.[4]
In her discussions of science fiction, Haraway often alludes to the anthropologist Marilyn Strathern’s (1992, 10) observation that “it matters what ideas we use to think other ideas (with)” (quoted in Haraway 2004, 335; 2011, 4; 2016, 34). SF matters because its ideas and images can travel and thus become part of how we think, tell stories, describe, or imagine things that are not necessarily fictional. Indeed, as she had previously insisted, “the boundary between science fiction and social reality is an optical illusion” (Haraway 1990, 149).
Haraway does not put forth a categorical definition of the imaginary, possibly because that would itself set a fictive limit to the imagination. As I use the term here, however, imaginaries can be broadly understood as the materials of imagination. Materials can be durable substances (i.e. forms of “matter” or “materiality”) but the term also encompasses ideas, facts and data (as in “gathering materials” for research) and qualities pertaining to particular activities. These encompassing and somewhat amorphous definitions make “materials” very useful for grappling with how different communities make and remake robot imaginaries out of elements as different as electronics and fiction-writing.
Similar to Latour’s (1988) “principle of irreduction,” anything can be(come) an imaginary if it is (convincingly) made into one. Indeed, this is why it matters what imaginaries we use to imagine other imaginaries (with). The premise in this article, then, is that fictional and real-life robots are at once made from materials of imagination and are such materials in their own right.[5]
In the following, I draw on Donna Haraway’s (2011, 2016) notion of string figures to show this co-constitutive relationship between SF and technoscience at work in the realm of robotics. For Haraway (2011, 12), importantly, SF stands not only for science fiction but also for speculative fabulation, speculative feminism, speculative fiction, science fact, science fantasy, and string figures. String figures is a generic term for an old, common game, in which players use their fingers—or other body parts—to manipulate string into a shape and pass it to another player who will make a new one. Analogously, storytellers, roboticists, robots, and many others participate in a game of string figures, shaping and reshaping feminism and technoscience together. String figures can be a multispecies game, as Haraway (2016, 10) illustrates in relation to companion species. In this paper, robots also become part of the game.
Thus, I show how robot imaginaries are created through string figures with reference to my research on Japanese humanoid robots (humanoids). Humanoids have been defined as “machines that have the form and the function of humans” (Bekey et al.2008, 71).[6] They are, supposedly at least, the closest cousin to fictional robots as they were originally conceived.
Ethnographically, the paper is concerned with people who develop humanoids and use them in experiments. I have spent nine months at a cognitive robotics laboratory—the “Matsumoto laboratory”[7]—located in the Kantō region. The head of the lab, Professor Hideaki Matsumoto, is one of my main interlocutors, and a strong presence in Japanese robotics and artificial intelligence (AI) circles. Aside from this fieldwork, I have followed Japanese and international academic and public events pertaining to robotics and AI for several years.
I begin by introducing the humanoid robot research, and consider what it might be good for, given its limited practical usefulness. I then describe some string figures played with the laws of robotics, and show how they create some powerful imaginaries that reproduce rather similar kinds of robots. In conclusion, I suggest that the liminal nature of the robot incites curiosity. It creates the allure to continue the string figures games, to enrich the imaginaries, and to explore the contingent potentials and limits of the humanoids.
On the Uselessness of the Humanoid Robot
Above, I referred to the material-semiotic multiplicity of the robot. Here, I elaborate some peculiar aspects of humanoid robot as a technology. Specifically, I contrast current uses for humanoid robots with imagined or projected uses. This allows me to argue that humanoid robots are in some important ways significantly different from many other technoscientific objects.
“What is a humanoid robot good for?” is, in fact, quite a confusing question. It is relatively easy to tell what a wrench is for, or a car, or a mobile phone. Those technologies do something better than other alternatives, they have a domain of application in which they are unsurpassed, what is today called a “killer app.” But the humanoid robot does not have a killer app (Bekey et al. 2008, 86; Ishiguro and Ikeya 2010). There are indeed situations where having a humanoid body is potentially advantageous for a robot, for example if they are to share intimate space with humans or need to use tools designed for average human bodies. In practice, however, a humanoid body is almost never a must and the vast majority of robots currently in use neither need nor has one.
Nevertheless, if we hold on to the question a bit longer, what might humanoid robots be good for? They could beused in the military and for security, in medical services; also in homes, space, manufacturing, and for dangerous jobs such as construction or firefighting (Bekey et al. 2008, 86). In addition, in newer branches of robotics there is a growing trend to use humanoids as laboratory equipment in an effort to replicate human cognition and psychological development (Kemiksiz 2019).
In the specific context of Japanese techno-scientific discourse, the “ageing society” (kōreika shakai) is also an important keyword (Ishiguro et al. 2007, 162; Kawashima and Tadano 2014, 4). In the popular science book Hajimete no robottokōgaku (First Steps to Robotics), the authors paint a vision of a futureJapanese society where “next generation robots” alleviate the workload of younger generations in the ageing Japanese society by taking on housework, caring for the elderly, or work in search-and-rescue and medical services (Ishiguro et al. 2007, 162). Indeed, the ageing society and corresponding labor shortage is ubiquitous in scientific writing on robotics as well as in Japanese media and policy communication. For example, Jennifer Robertson’s (2018) anthropological analysis explores robotic labor in relation to changing Japanese demographics.
However, though these ideas for what humanoid robots might do are prominent, they are all in the realm of potential, without an estimated time for a breakthrough. While humanoids such as Softbank’s Pepper, which is used for “entertainment” do exist, it would be a stretch to say they fulfill any deep societal need (cf. White 2018). All in all, the honest answer to what humanoid robots are presently good for is “not much.” This is brought home by the roboticist Junichi Takeno, who admits that “humanoids are not yet good for practical use” (2013, 10).

Takeno cites doubts about the effectiveness of bipedal walking and safety as major stumbling blocks for the practical utility of humanoids, and it is, in fact, very difficult to make humanoid robot bodies move like their organic counterparts.
From 2012 to 2015, the US Defense Advanced Research Projects Agency (DARPA) held a worldwide robotics challenge with the purpose of developing rescue robots “capable of executing complex tasks in dangerous, degraded, human-engineered environments” (DARPA, n.d.) Almost all the robots that reached the finals were bipedal humanoids developed by some of the world’s top laboratories, yet many executed the tasks so poorly that videos of the robots falling down became an Internet phenomenon for some time after the competition. During my fieldwork, I have heard “[it] didn’t move well” countless times, and repeatedly seen researchers get frustrated about the limitations of their robotic platforms, not to mention the amount of maintenance required to keep them working. All laboratories have robots lying around (see Fig. 1) waiting to be repaired or simply discarded. The only time I have seen robots performing almost flawlessly was at an automotive factory where I worked for a short time; and they were neither humanoid nor had any sense of the environment where they conducted their tasks.
In sum, then, the robot certainly does not have to be humanoid to be a viable technology. And yet, there is significant interest in humanoid robotics worldwide. In Japan, for example, many technology and automotive giants—Honda, Toyota, Sharp, Mitsubishi—have their own humanoid robots. Despite news of the shutdown of Honda’s ASIMO program (Furukawa 2018) and of Rethink Robotics which developed the humanoids Baxter and Sawyer (Vincent 2018) in 2018, humanoid research is growing along with general trends in robotics and AI.
There have been sporadic attempts to make humanlike machines since the Middle Ages (automata, simulacra and others). And, despite the fact that humanoid robots have consistently failed to live up to the ‘dreams’ that motivated their design, efforts to create them have continued for more than a century. It seems clear, then, that the interest in humanoids have other sources than practical utility. Imagining various things, and later machines with humanlike qualities seems to be quite a widespread human habit. The robot, as its precursors in fables and myths, are imaginations of an artificial Other. A humanlike Other made by humans is central to much of the science fiction and robotics development imagination. Indeed, various science fiction imaginaries serve as pervasive references for the technological imagination. In terms of string figures, they might be thought of as easily identifiable twists in the string.
In the following section, I discuss “the laws of robotics” originating in the works of the prolific SF author Isaac Asimov, as an example of a reference so pervasive that it has seeped into how we imagine real-life robots, too.
Playing String Figures with the Laws of Robotics[8]
The robot is a machine made by people. But can it also be a person? And if it can, what sort of a person would it be? For example, should robots be controlled in similar ways as other kinds of machines or as humans? In fact, imaginaries of the potential personhood of robots are usually quite limited, and the idea of making “laws” for robots is a common feature among them. Here, I consider what the form and content of these laws teach us about robot imaginaries. I depict a game of string figures, where Isaac Asimov’s fictional laws of robotics ends up having real-life implications.
Long before the appearance of the robot, the artificial human, or the artificial Other, incited fears. Initially, artificial humans were not necessarily evil, but somewhat grotesque, like the Golem of Jewish mythology, which was essentially a protector. Similarly, the Being from Mary W. G. Shelley’sFrankenstein: The Modern Prometheus (1818) is an artificial human that ends up looking so monstrous that it is abandoned by its creator. Isaac Asimov (1978) named the human fear of robots the “Frankenstein Complex.” Frankenstein can be interpreted quite differently if one considers the scientist, Victor Frankenstein, as the monster. Yet Asimov is certainly right to emphasize the impact of the novel on popular imaginations.
Soon after he began writing on robots, Asimov ([1942] 1995, 269) formulated his enormously influential Three Laws of Robotics, which would be “built most deeply into a robot’s positronic brain.” The Laws are as follows:
1. A robot may not injure a human being or, through inaction, allow a human being to come to harm.
2. A robot must obey orders given it by human beings except where such orders would conflict with the First Law.
3. A robot must protect its own existence as long as such protection does not conflict with the First or Second Law. (Asimov [1942] 1995, 269–270)
Asimov’s laws are generally conceived as robotic equivalents of morals, yet they differ from human ones both in terms of context and effect. For one thing, Asimov’s robots cannot even think of breaking the laws without risking fatal failure. Mental conflicts regarding the laws can render them inoperable. In other words, the laws of robotics are binding in a way that human laws are not.
Asimov himself experimented with his laws and their implications over the years, and eventually added the Zeroth Law, which precedes the other three in importance. In Robots and Empire (Asimov 1998), a telepathic robot called R. Giskard Relentlov[9] faces a dilemma, as he will need to break the First Law to save the Earth. For this higher purpose, Giskard reprograms himself to implement the Zeroth Law, which prioritizes the preservation of the well-being of humanity even at the cost of harming individuals.
Asimov’s Laws have massively influenced imaginations of robot-human relations up to the present. They have been widely discussed in the sciences and humanities (see McCauley 2007), and there are laboratory experiments based on them (e.g. Vanderelst and Winfield 2017, Kaminka et al. 2017). Thus, the string figure of robot morals crosses over into reality. However, this movement into reality has also served to harden the imagination, as the fictive Laws have turned into something akin to a norm. In an insightful essay “Robots in Science Fiction,” the SF author Stanisław Lem criticized Asimov’s Laws of Robotics for forcing artificial humans into a master-servant relationship:
I have forgiven Asimov many things, but not his laws of robotics, for they give a wholly false picture of the real possibilities. Asimov has just inverted the old paradigm: where in myths the homunculi were villains, with demoniac features, Asimov has thought of the robot as the ‘positive hero’ of science fiction, as having been doomed to eternal goodness by engineers. (Lem 1971, 313)
As Lem indicates, Asimov’s laws indeed seem like counters to an imagined threat than as constructive guidelines for ethical behavior.
At the time of their original formulation, Asimov did not imagine there would ever be any real-life robots (Asimov 1995, 9). Yet, when they did appear, he still continued to defend the laws:
My own feeling is twofold. In the first place, I don’t feel robots are monsters that will destroy their creators, because I assume the people who build robots will also know enough to build safeguards into them. Secondly, when the time comes that robots-machinery in general-are sufficiently intelligent to replace us, I think they should. We have had many cases in the course of human evolution, and the vast evolution of life before that, in which one species replaced another, because the replacing species was in one way or another more efficient than the species replaced. I don’t think homo sapiens possesses any divine right to the top rung. If something is better than we are, then let it take the top rung (Asimov 1987, 68–69).
The quote combines anthropocentrism with a rather twisted interpretation of the survival-of-the-fittest. The fear that humanity might be displaced “from the top rung” by the robotic ‘species,’ implies that two intelligent species can only co-exist in conflict over power. What is left out are out other possible sources of imagination—such as coexistence and equality—or mutual curiosity.
Osamu Tezuka’s Astro Boy (Tetsuwan Atomu, manga serialized between 1952–1968) immensely influenced the image of the robot in Japan, including the science of robotics. Contrary to the robots of the 1950s English-speaking world, where robots were often depicted as somewhat intimidating, the character Astro Boy was a loveable superhero. Despite (apparently) never having read Asimov (Schodt 1990, 76), Osamu Tezuka, the creator of Astro Boy, also came up with a set of laws for robots:
1. Robots must serve humankind.
2. Robots shall never kill or injure humans.
3. Robots shall call the human who creates them “father.”
4. Robots can make anything, except money.
5. Robots shall never go abroad without permission.
6. Male and female robots shall never switch [gender] roles.
7. Robots shall never change their appearance or assume another identity without permission.
8. Robots created as adults shall never act as children.
9. Robots shall not assemble other robots that have been discarded by humans.
10. Robots shall never damage human homes or tools
(Mushi Purodakushon shiryōshū 1977 quoted in Robertson 2018, 130)
In commenting on Tezuka’s laws, Jennifer Robertson emphasizes that they both reflect and consolidate kinship between humans and robots. She argues that the relationship inscribed in these laws are not determined by differences between “species” but rather by the “manner of their bonding,” which conforms to the “hierarchical structure of the ie” (2018, 131).[10] Similar to Asimov’s rules here is another imperative for obedience, yet the relations are imagined quite differently. For instance, Tezuka’s laws ensure that robots do not pervert the normative roles of adult and child, man or woman.
The more general point of interest is that Asimov and Tezuka, more or less contemporaries yet from quite different cultural perspectives, evidently both felt the need to create laws that would specifically govern robots. Despite their greater level of detail, however, Tezuka’s laws are not as central to his world-building as Asimov’s are to his. And indeed, even in Japanese robotics, where Tezuka’s Astro Boy is such an influential figure, any discussion of ‘ethics’ will defer to Asimov (e.g. Ishiguro et al. 2007, 14; Kawashima and Tadano 2014, 4).
Asimov and Tezuka both created robot laws in the image of human ones. Others, however, have experimented with changing not the notion of law, but rather its humanlike image. This is exemplified by Toshitada Doi, an important figure in Japanese robotics and one of the researchers behind Sony’s dog robot AIBO, which has been an important real-life experiment for companion robots in Japanese society (Kubo 2015).
Reimagining Asimov’s Laws of Robotics,[11] Doi proposed the “Three New Laws” for companion robots. The first law, which prevents a robot from injuring a human, stays the same. The second law, however, is quite different. While establishing the general principle that the robot should direct its love and attention towards the human being, it opens the possibility that the robot companion can oppose the human. The third law also differs from Asimov’s imperative for the robot to protect its own body unless it conflicts with the previous laws. Doi’s laws state that the robot must listen patiently to the idle complaints of the human, but it is alright for the robot to ‘strike’ back. If the partner robot is asked to fetch the newspaper, for example, it may do so, but it may also just grumble, saying the weather is cold (Asahi Shimbun 13 Jan 2001, quoted in Kubo 2015, 209). In short, Doi’s laws depart from the imperative of preventing harm, as do those of Asimov, yet they do not establish a relationship of submission. Doi’s alternative shows it is possible to create different imaginaries even if one is playing the same game of string figures (with “laws”), something he accomplished by adding an idea of companion species to the mix.
This section has discussed some of the strings woven by writers and scientists as they imagine the need to regulate the relations between robots and humans. These laws emerged out of a certain distrust of the artificial Other, who combined machinic strength with some sort of intelligence. Asimov’s laws were designed to keep robots from dethroning humanity, whereas Tezuka aimed to ensure the integration of robots into the Japanese society. Though Asimov’s problematic laws have turned into a very powerful imaginary, Doi’s reformulation—assisted by AIBO—indicates that it, too, can be reshuffled and repurposed.
In the next section, I further explore how particular robot imaginaries have become familiar in the Japanese context, yet still remain open to reconfiguration.
The Familiarity of the Boybot
Humanoid robots are familiar to most of us because of SF. To many, they are certainly more familiar than real-life factory robots or robot vehicles. In that sense, SF has created an imaginary space for robots that do not exist (yet). This power to familiarize the unfamiliar and defamiliarize the familiar can be seen as a general characteristic of SF. The “general public” often reads SF as predictive of future technoscientific developments, or such developments as realizations of SF (see Kemiksiz 2016).
This makes it tempting to consider robots as a kind of prototype, perhaps along the lines of the STS scholar David A. Kirby (2010, 42), who has referred to fictional technologies in general as “diegetic prototypes.” He used that term to designate “performative artefacts” that simultaneously demonstrate the need for a technology and highlight its benevolence and viability. He also proposed that SF can be seen as a mode of science communication (Kirby 2003, 262).
Yet, while popular representations of fictional technologies can become powerful imaginaries, a reduction of science fiction storytelling to science communication or scientific creativity to SF does not do any of them justice. Not least, in the case of the humanoid robot, the notion of a prototype misleads since robot fictions and technoscience development have evolved in parallel over the last two centuries (see Kemiksiz 2011). Over time, robot imaginaries emerge in the traffic between interconnected practices of media, SF, policy and technology. It is possible to understand this situation by considering it in terms of co-created, partly unpredictable string-figures.
Despite the potentially innumerable ways in which a humanoid robot can be conceived, certain imaginaries are in reality far more prominent than others. Such powerful imaginaries can indeed be thought of as “performative artefacts” and, one way or another, they are related to science fiction storytelling. In order to elucidate the two-way relationship between SF and technoscience, I now turn to what is probably the most popular and most familiar imaginary of the Japanese humanoid robots: a companion robot with a boy-like attitude.
As far as I am aware, the main fictional precursor for the Japanese humanoid robot is Astro Boy, the protagonist of Osamu Tezuka’s manga series of the same name. The Japanese academic robotics literature is full of references to Astro Boy. I call this type of robot the “boybot.” In general, it is behavior rather than design that prescribes boyhood. A significant majority of Japanese humanoid robots are programmed to behave like, and are perceived by the Japanese as, boys.[12]
Japanese popular science books, and academic literature on robots generally, almost always refer to Astro Boy. In the popular science book First Steps to Robotics, the authors write that: “For most people, the image of robot is made up from manga or television characters such as Astro Boy” (Ishiguro etal.2007, 158). His most important characteristics are that he is a super-machine capable of great power and abilities, such as flying, and that he is a friendly companion to humans. The authors, major figures in Japanese robotics and industry, suggest that while the former is attainable, the latter requires more research into the human mind and human behavior. They add that research is developing in this area precisely because most researchers share the same image of robots, and try to make it into reality (Ishiguro et al. 2007, 158).
Another example of scientific literature referring to SF is from an international article on cognitive developmental robotics,[13] which starts with a similar message:
Robot heroes and heroines in science fiction movies and cartoons like Star Wars in US and Astro Boy in Japan have attracted us so much which, as a result, has motivated many robotic researchers. These robots, unlike special purpose machines, are able to communicate with us and perform a variety of complex tasks in the real world (Asada et al. 2009, 185)
A survey conducted by PESTI (2015)[14] identifies quite a variety of needs for robots in Japanese society, which are categorized as “superhuman,” “partner,” “taking over chores,” and “human-likeness.” Similar to the researchers quoted above, the robot should do what humans cannot or do not want to do, all the while being friendly to and understanding of humans. The ideal robot for current Japanese publics is therefore a companion robot, like Astro Boy, Doraemon, or one of the many other figures from Japanese robot anime and manga that also behave like boys.
At a group meeting in the Matsumoto laboratory in June 2017, a post-presentation discussion turned into a more general conversation on Japanese humanoid robots and how people perceive them. Dr. Kobayashi, an assistant professor at the lab, commented on one of Hiroshi Ishiguro’s famed geminoids,[15] Minami. Like most androids developed by Ishiguro’s group, Minami looks like a young Japanese woman. Minami had been positioned in shopping malls where she interacted with customers through commands entered on a tablet.
“When Japanese people make robots, they make child robots, like Astro Boy,” Kobayashi asserted, invoking a tweet by the human-agent interaction researcher Dr. Hirotaka Ōsawa, according to which the Japanese often use ‘the child metaphor’ for robots (Ōsawa 2017). “Minami is an adult,” Kobayashi continued, “that is why she is selling things.”
I had previously written on the boybot, but this was the first time I heard roboticists referring to the childish personality of robots in a public setting.[16] Kobayashi’s casual comment aligned with my sense that there is a relation between how a robot looks (and presents itself) and what it is made to do. Similar to the socioeconomic imaginaries discussed by Jennifer Robertson, a robot fashioned to look like a proper adult can be used for selling things but it is inappropriate for a child robot to do so. It is, of course, rather common to find discrepancies between projected technological applications and sociocultural norms. What is interesting about this case is that the most important factor relates to the personality of a machine.
That the boybot imaginary is deeply embedded in the development of Japanese humanoid robots is exemplified by two examples: ASIMO and Pepper. Honda’s ASIMO (fig. 2) has long been the poster boy of Japanese humanoid robots. ASIMO is a 130 cm tall bipedal robot capable of climbing stairs, standing on one leg, and pouring a drink into a cup, etc. (Honda Corp., n.d.) ASIMO was never a commercial robotic platform, although Honda has applied the underlying technologies to other, more practical, products. Instead, ASIMO performs in public demonstrations, and he is listed as one of the science communicators of Miraikan.[17]
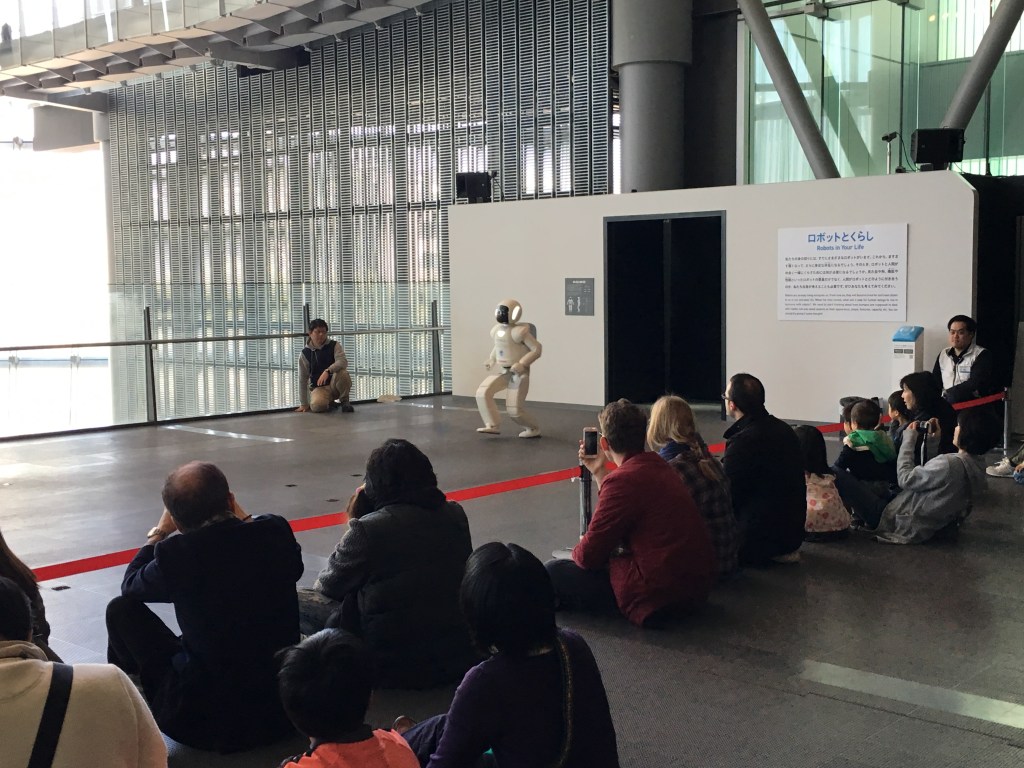
ASIMO’s performances are indeed quite a spectacle. They have changed slightly over the years, yet certain elements are consistent. ASIMO always introduces himself as a science communicator and a “partner to humans.” He proceeds to tell the audience about his dream, which is to live together with humans, and he asks the audience if they would like to live with robots as well. When demonstrating his capacity for movement, it is often in the company of a human; he may rush to aid a person or walk alongside someone. ASIMO also tends to boast about his abilities. His performance always ends with a song that he also shows in sign language. The song is about his dreams of today and tomorrow, and about how we should all come together to make our dreams come through. Both melodically and lyrically it is a children’s song.
ASIMO is not officially gendered, nor is he officially a child. The machinic body is small and nonspecific. But though he is simply a robot with a dream and a fondness for singing (Miraikan n.d.b), the Japanese invariably perceive him as a boy, as I first realized at a ASIMO demonstration years ago, when all the children called him “ASIMO-kun” ––an honorific used for boys or younger men.[18]
Pepper (see Fig. 3), created by the telecommunication giant Softbank is also viewed as a boy. In June 2015, Softbank started selling Peppers as personal robots, and they are now quite common. Pepper is 121 cm tall and has wheels instead of legs (Softbank Corp. 2015). Not very agile, Pepper shines most brightly when it comes to communication, having been designed to “recognize basic human emotions” (Softbank Robotics, n.d.) Softbank promotes the development of apps to enhance the potentials of Pepper. My personal interactions with Peppers since 2015 have varied from playing a video game together to getting my fortune read by him.
Notwithstanding Kobayashi’s views about the inappropriateness of child robots selling things, there are now many Peppers working at shops, though not necessarily selling merchandise. Indeed, businesses are where Peppers are most visible to the public, and where they most effectively demonstrate their abilities. That Pepper has recently begun using his childish self, playful and endearing, to help potential customers suggests that new string figures are emerging. Doing what is inappropriate for a human boy, robot Pepper’s own potentials seems to be expanding. This also exhibits the dynamic and open-ended nature of the co-creation of the materials of imagination, which sometimes can generate unexpected results from what appeared “familiar.” In contrast with highly controlled demonstrations of ASIMO, Pepper demonstrates the unpredictable transformations of imaginaries in a context where multiple players are involved in string figures simultaneously.
Peppers, however, are not only sold to businesses, but also to homes for personal use, and to laboratories for experimentation.

In fact, every robotics laboratory that I’ve visited in Japan have had Peppers. This is the more surprising since they are mostly turned off, and many interlocutors have said that Peppers are not very useful for their experiments. What they can do, however, is interact with people, so they are often in action at Open Campus events.
Laboratory Peppers that are not used for experiments are generally ignored by students. During my time at robotics labs, I observed only a single unusual interaction. On a July day in a room at the Matsumoto lab, three students were trying to switch on a Pepper. To me, he looked sad, his shoulders slumping. When the students tried to boot him, he lifted his head and said “I’m not feeling well. My foot seems to be stuck. I’m sorry. Please reboot [me],” then slumped once more. There was indeed something wrong with his “foot”: the wheel cover was not closing because something was not properly attached. The students crouched on the floor trying to fix the wheel while joking “Does he not want to participate in the Open Lab?” After a while, someone said “Should I kill [him]?”, opening a soft flap on his back that exposed a red button. I hadn’t seen the button before so I asked what it was for. It is apparently a kill switch, which the student told me is for when the robot “goes berserk in the city.” He then suggested to “karate-chop the button like in Golgo 13,” a move he demonstrated with flair.
This was the only time I saw students interact with a robot in this manner in the Matsumoto laboratory. At that time, only one student worked on Pepper for his graduation project. Most others work on NAOs (see Fig. 1) and some new generation industrial robots with humanoid upper bodies.[19] While I was there, these projects did not involve talking robots, and the experiments were mainly on recognition of the environment and object manipulation. In other words, these students do not have conversations with their robots, they talk about them but the robots do not respond. By talking back, this Pepper apparently activated a different imaginary from that of robots as laboratory equipment. Through this interaction, the characteristics of the “boybot,” usually submerged in the lab, re-emerged.
Peppers, like ASIMOs are not designed to hint at a gender. But as noted every Japanese interlocutor has told me that Pepper is a boy. When I ask why, I have received various answers. One, offered by the master’s student Mai, made the most sense to me. She said that Pepper is a boy “because he is annoying. He asks things like ‘you free now?’ and always wants my attention. Japanese girls are ‘good’ kids, they do not do annoying things.” In contrast, Lúis, a visiting researcher who worked with Pepper in Europe, drew on a cultural repertoire that associates “feminine” with companionability and emotional intelligence when he insisted that Pepper is a girl because of her small stature, expressiveness, and because she has been designed to read human emotions. European Peppers, he insisted, are not child robots. What counts as familiar evidently depends on socio-cultural codes.
However, it probably matters, too, that Lúis does not speak Japanese, and is thus unable to capture Pepper’s Japanese gender connotations. Just like ASIMO changes when it speaks in English, it seems that Pepper becomes a different robot depending on language proficiencies and country of residence (cf. Jasanoff and Kim 2015). The same robot can be very different things depending on whether it lives in Softbank Robotics laboratory in Paris or in a souvenir shop in Osaka. These examples suggest that variable notions of familiarity have important implications when playing string figures with emerging technologies. Even if some patterns are significantly novel, the string is manipulated to partially align with the rest of the world. In Pepper’s case, the technoscientific assemblage (i.e. the robotic platform) takes different shapes in different hands, and gathers different sociocultural meanings. Even if the material materials remain the same, other cultural materials can make all the difference.
But even if while cultural and national imaginaries clearly do matter, this is not to say that they determine how humanoids are imagined. This becomes clear if we return to the full tweet to which Dr. Kobayashi referred to during the laboratory meeting. It reads: “Saying this as an expert, most Japanese companies do not assign genders to their robots. The way gender is perceived differs according to culture (such as, in development, Pepper was given a male name in Japan and a female name in France).[20] And personally speaking, the Japanese often use the child metaphor for robots” (Ōsawa 2017, translated by the author; Italics added). Ōsawa’s dual framing, as an objective expert and as a personal subject, parallels the students’ playful engagement with the Pepper. Yes, the same robot is imagined differently by people in different cultural spheres. But then, even the same person can activate different imaginaries to do different things with Pepper––theorize, experiment, speculate, interact.
In the next section, I further consider how the liminal nature of robots tends to induce curiosity.
Through the Looking Glass
The roboticists I have met ended up in the field for different reasons and via different journeys. Some roboticists are indeed influenced by SF; prominent among them is Professor Ishiguro, who has written a book on his inspirations from SF films (Ishiguro and Ikeya 2010). “The idea is not in research,” he insisted, “it is in daily life or films” (Ishiguro and Ikeya 2010, 29). Interestingly, he has also publicly stated that he is not really interested in robots but rather in humans, and indeed he has suggested that those who are mainly interested in robots tend to make Gundam-like (i.e. mecha, see footnote 12) robots. Indeed, surprisingly few roboticists with whom I have spoken are interested inrobots exclusively for their own sake. For example, Professor Matsumoto, who was originally trained as a mechanical engineer, spent years doing research in a brain science institute because his knowledge of hardware was insufficient to understand intelligence.[21] Professor Minoru Asada (2010) has written that robots are the key to unlock the secrets to human brains and intelligence.
As noted, Ishiguro is famous for making photo-realistically human-looking androids, and explicit about his influences from SF. Nevertheless, his aim is not to recreate the androids of science fiction. Nor is any other robotics project that I am aware of. Rather, my ethnography suggests that roboticists are drawn to the liminality of robots, which they use to explore topics that lie beyond it—from intelligence to embodiment, from self to consciousness. Similar to the authors and artists with whom they indeed also play string figures, roboticists are drawn to robots as machines that arouse curiosity.
The robot struggling to become, or to be considered as, human, is a generic storyline in the history of science fiction. More often than not, the function of the artificial Other in fiction is to open the question of what it means to be human (see Kemiksiz 2011). Is the human a machine? Which human traits can be replicated in a humanlike machine, and which cannot? Can a machine feel emotions, empathize, or have a free will? These questions have been around for a long while, but before the emergence of complicated machines, they were asked differently––by contrasting the human with other non-humans. SF has generated countless robot stories revolving around these questions, and, as I see it, robotics science has its origins in a similar kind of curiosity.
My own ethnographic fieldwork has focused on relatively new branches of “cognitive,” “neuroscience,” and “developmental” robotics. These multidisciplinary research areas are inspired by the sciences of mind and behavior to replicate human cognitive traits in embodied agents; i.e. in robots. This often depends on what is called “synthetic methodology,” which “can be characterized as understanding by building” (Pfeifer and Bongard 2007, xviii). In other words, through the process of replicating cognitive traits and behaviors, they aspire to get a better understanding of the human.
While my fieldwork is far from representative, the concern with exploring all kinds of things through the robot is deeply embedded in the discipline. Indeed, it seems to me that the robot itselfhas some capacity to prompt questions about mind, intelligence, or emotions. Once, Dr. Kobayashi told me that researchers inevitably become interested in the philosophical implications of the robot, because the robots make them doubt their own assumptions. It has an unsettling influence on almost everyone that seriously ponders it. Some choose to develop actual robots, some write stories about them—and some end up conducting ethnographic research!
In Japanese robotics, the notion of the “robot as a mirror” is often invoked. Professor Ishiguro’s book What is a Robot? A Mirror that Reflects the Heart[22] of Human (2009) explores the motivations and implications of using the robot to address what the “human” is. Similarly, Asada (2010, 21) bases his research on the principle that the robot is “an artifact that reflects the human.”
A story about the late roboticist Ichirō Katō, who made the world’s first humanoid robot, vividly illustrates the curiosity that motivates the making of human-like machines. I heard it from Professor Matsumoto, who reveres Katō and briefly studied under his guidance. In this story, a young Katō is interested in philosophy, particularly the philosophy of mind. But this is the time of the war, and Katō knows that philosophers will end up at the battlefront. Thus, he chooses to study electrical engineering at Waseda University and receives his bachelor’s degree after the war. A decade later, in the 1960s, he has become assistant professor at the university’s department of mechanical engineering. Yet he is still interested in human beings, and cybernetics is gaining popularity. At first, he ostensibly works on mechanical limbs, since prosthetics is a valuable research topic in the post-war world. But in the 1970s he finally turns to humanoids. Over the decades, he continues working on robotics with a lot of influence from cybernetics, and a focus on “making a human.” He develops a distinctive engineering approach to (philosophical) anthropology.[23] Meanwhile, he passes his legacy on to disciples and students, including Matsumoto. Matsumoto once told me of the day, almost three decades ago, that Katō had advised him to study the “kokoro” of the robot. Kokoro is a Japanese word that can both designate “heart” and “mind,” with additional connotations of “will” and “emotion.” Katō thought that the robot can “reflect” the kokoro of humans. Matsumoto himself took the advice to heart and has been studying it ever since.
The veracity of the story of Katō matters less than what it indicates. Here is a scientist who weaves imaginaries of the philosophy of mind, cybernetics, and robots together with metal and plastic in post-war Japan. Not only does he develop pioneering technologies, but he himself becomes a story, at once embedded in the robots he develops, and passed onto others. The player of the string figures eventually becomes part of the imaginary he creates. The story also emphasizes that kokoro, or its possibility in a machine, is crucial to the Japanese humanoid robot, and maybe has been since its emergence.
Conclusion
I was fascinated by the potentials of an artificial Other long before I started doing research on robots. And I have often been frustrated by the limited and limiting ways in which they are imagined. Robots could have been anything––they still can be anything––but, particular imaginaries tend to prevail over all others: the robot as laborer, care worker, slave, hero, or villain.
In this paper, I have analyzed fictional and actual robots as made from a dynamic field of facts and fictions. I have referred to this field as comprised of materials of imagination, and described how these materials are shaped and reshaped in an ongoing, collective game of string figures. As strings are passed back and forth between players, a fictional robot might become a reference point for an actual robot, such as Astro Boy, or vice versa. At each moment, the player takes into consideration prominent imaginaries—like Asimov’s view of how to manage relations between robots and humans—and adapts, prolongs, inverts, or indeed perverts them, as perhaps illustrated by Doi’s canine robot laws. Moreover, as exemplified by Pepper, the robots themselves are also participants in the game; their “machinic agency” often exceeding the intentions of their creators.
As I have suggested, these processes of continuous, collective reimagining are in an important sense prompted by the liminal nature of the robot: a machine that, at least in fiction, can be very humanlike. It might be that one of the most enduring qualities of the robot—as an artificial Other—is that of inducing human curiosity. The robot, as it were, makes it possible to experiment with what it means to be human through a nonhuman medium. In Japanese robotics, this peculiar characteristic is described in terms of “mirroring,” a matter of looking at robots but having kokoro reflected back.
It might be said that the robot combines forms of curiosity conventionally piqued by the marvelous artificial Other with other more familiar imaginaries. Just as science fiction itself, it is at once strange and familiar. Indeed, this is one reason why it matters which imaginaries are activated in imagining the robot, and which fade into background. In addition to shaping how we build, configure, contextualize and relate to robots that are supposed to transform societies and lives; how we imagine robots also matters, since it affects our understandings of human and non-human relations in general.
As Kobayashi insisted, the robot has the capacity to make its human interlocutors think about grand concepts like life or being human, but also to make them doubt what they thought they knew. Arguably, similar to Haraway’s simultaneous SFs—science facts, science fictions, speculative fabulations, speculative feminisms, science fantasies, and so fars—robot imaginaries facilitate exploration of the limits of human. Differently embodied robots open up different possibilities for reconfiguring the world.
Isabelle Stengers (2019, 2) has described science fiction as a continent with a wide diversity of inhabitants. Astro Boy turned out to be highly influential in Japanese robotics so far, but science fiction still has rich untapped potentials for thinking differently with the robots; not least about what happens beyond experimental research settings. This is especially important because robotics, similar to other fields of technoscience, is also tightly connected with capitalist systems and their forms of production. These days, the combination of capitalist imaginaries of labor with intensive efforts to replicate human intelligence in machines leads to experiments, ethics discourses, and, in some cases, robotic performances, that are downright disturbing. Science fictional thought experiments are important for allowing experimental robotics to imagine routes into other worlds, and for exploring the relations of robots and humans, not reductively, but in their “many entangled repercussions” (Stengers 2018, 31).
Notes
[1] An American company named Westinghouse produced a telephone answering machine called “Televox” in 1927. As soon as it was made public, it was likened to the robots of R.U.R. (Kubo 2015, 49). Televox was followed by multiple technical objects that were branded as real-life robots despite their questionable likeness to the robots of SF. Eventually the branding took hold and those entities came to be seen as “real-life robots.”
[2] Some robots do not have both characteristics. Inversely, there are machines that fit the description although we do not call them robots (e.g. a microwave oven).
[3] Appadurai (1996) coined five types of ‘scapes’: ethnoscapes, mediascapes, technoscapes, financescapes, and ideoscapes.
[4] In the development of a technoscientific object such as the robot, the personal beliefs of a researcher (as in Marcus 1995) and the visions of the society in which the postulated technology exists (as in Jasanoff and Kim 2009) are both relevant to imaginaries, and both can be related to science fiction. However, my field research indicates that imaginaries invoked around the robot also often includes surprising things that are not–at first glance about it.
[5] Robots in their material form, i.e. as technoscientific artefacts, can also become imaginaries: either reference points for, or just images of what a robot is, could, or should be.
[6] The same reservations about the definition of the “robot” also apply here (see footnote 2 above).
[7] All names are pseudonyms. However, I use real names when referring to public talks given by roboticists.
[8] The title alludes to a chapter of Staying with the Trouble (Haraway 2016).
[9] In Asimov’s stories, robots have the initial “R.” with full names, as they can be virtually indistinguishable from humans, this initial becomes the indicator of their status.
[10]Japanese for “household.”
[11] Doi also worked on the development of Qrio, a humanoid robot by Sony (prototype released in 2003).
[12] I can identify three major robotic figures in Japan, which are materialized in robotic platforms mixed with imaginaries regarding companionship, socio-economic needs, gender, etc. Aside from the boybot, there is the gynoid or the female android, and the mecha. Androids are characterized by a photorealistic resemblance to humans. They may have hair and silicon skin. As of early 2019, all the androids––that are not designed to mimic famous people––perform as women. The gynoid imagery feeds from the many female robotic bodies in Japanese SF, including Arale Norimaki of Dr. Slump (Akira Toriyama, manga serialized between 1980-1984), a little girl robot with super strength, and the gynoids of Chobits (Clamp manga collective, manga serialized between 2000–2002). Ghost in the Shell’s (Masamune Shirō, manga serialized between 1989-1990) cyborg protagonist Motoko Kusanagi is also an important figure, particularly for younger generations. Mecha, on the other hand, is a term for giant robots operated by humans. It also refers to an extremely populargenre of fiction in Japan. Despite the lack of practical, real-life value of giant robots, mecha imagery seeps into technoscience too (see Suidōbashi Heavy Industries, n.d.)
[13] Cognitive developmental robotics is a relatively new research field that draws from cognitive science and developmental psychology to reproduce human cognitive traits in robots (see Asada et. al. 2001).
[14] PESTI is an R&D project supported by Japan Science and Technology Agency (JST). The abbreviation stands for “Framework for Broad Public Engagement in STI Policy.”
[15] Geminoids are androids developed by Hiroshi Ishiguro’s laboratories (see Hiroshi Ishiguro Laboratories, n.d.)
[16] In my experience, many roboticists ––especially those who are early to mid-career––refrain from expressing personal opinions on the cultural or popular aspects of robots in academic contexts. Or they may deliberately separate themselves from such discussions.
[17] Miraikan, or the National Museum of Emerging Science and Innovation, employs both human and robot science communicators (See Miraikan n.d.a.)
[18] This changes on the rare occasions when ASIMO speaks in English. The character is completely different, and the voice is that of an adult.
[19]They were using Nextage by Kawada Inc. and Baxter by Rethink Robotics.
[20] The Japanese developers used the male nickname “Tarō” (Tanaka 2014) whereas the researchers in the French laboratory used the female “Juliette” (Moriyama 2014). Apparently, Softbank had to put “Pepper-Tarō and Pepatarō” in a short list of how not to name one’s Pepper in the Pepper Character Guidelines (Softbank 2019). In other words, even though the Japanese developers themselves conceived and configured Pepper as a boy, the company is trying to neutralize the association.
[21] Understanding Intelligence (1999) is also the title of a book by roboticist Rolf Pfeifer and Christian Scheier on the concept of intelligence in multiple technoscientific disciplines including robotics, cognitive science, and artificial intelligence.
[22] I used the word “heart” here for the Japanese word kokoro, which also means the mind and can incorporate associated concepts.
[23] Katō’s book Ningenkōgaku–Kōgakuteki ningengakucan be translated as “Ergonomics: Engineering Approach to (Philosophical) Anthropology”. The Japanese term ningenkōgakucommonly refers to “ergonomics,” however, Katō’s proposed science can be more accurately represented as “human engineering”: a science at the intersection of philosophical anthropology, physiology, and engineering with a focus on understanding the workings of “human” (Katō 1988, 10–13).
References
Anderson, Benedict. (1983) 1991. Imagined Communities: Reflections on the Origin and Spread of Nationalism. New York: Verso.
Appadurai, Arjun. 1996. Modernity at Large: Cultural Dimensions of Globalization. Minneapolis: University of Minnesota Press.
Asada, Minoru. 2010. Robotto toiu Shisō: Nō to Chinō no Nazo wo Idomu [The Idea of a Robot: Challenging the Mysteries of Brain and Intelligence.] Tokyo: NHK Shuppan.
Asada, Minoru, Karl F. MacDorman, Hiroshi Ishiguro, Yasuo Kuniyoshi. 2001. “Cognitive developmental robotics as a new paradigm for the design of humanoid robots.” Robotics and Autonomous Systems 37(2–3): 185–193.
Asada, Minoru, Koh Hosoda, Yasuo Kuniyoshi, Hiroshi Ishiguro, Toshio Inui, Yuichiro Yoshikawa, Masaki Ogino and Chisato Yoshida. 2009. “Cognitive Developmental Robotics: A Survey.” IEEE Transactions on Autonomous Mental Development 1(1): 12–34.
Asimov, Isaac. (1942) 1995. “Runaround” in The Complete Robot, 257–279. London: Voyager.
___. 1978. “The Machine and the Robot.” In Science Fiction: Contemporary Mythology: the SFWA–SRFA Anthology, edited by Patricia S. Warrick, M.H. Greenberg and J.D. Oleander, 244–253. New York: Harper and Row.
–––. 1987. “A Conversation with Isaac Asimov.” Interview by Earl G. Ingersoll, Gregory Fitz Gerald, Jack Wolf, Joshua Duberman and Robert Philmus. Science Fiction Studies 14(1): 68–77.
___. 1995. “Introduction” in The Complete Robot, 9–12. London: Voyager.
–––. 1998. Robots and Empire. London: Voyager.
Bekey, George, Robert Ambrose, Vijay Kumar, David Lavery, Arthur Sanderson, Brian Wilcox, Junku Yuh, Yuan Zheng. 2008. Robotics: State of Art and Future Challenges.London: Imperial College Press.
Čapek, Karel. (1920) 2014. Rossum’s Universal Robots. AccessedJanuary 29, 2019. Translated by David Wyllie. https://ebooks.adelaide.edu.au/c/capek/karel/rur/
Defense Advanced Research Projects Agency (DARPA). n.d. “Darpa Robotics Challenge (DRC) (Archived).” Accessed December 13, 2018. https://www.darpa.mil/program/darpa-robotics-challenge
Furukawa, Keichi. 2018. “Honda’s Asimo robot bows out but finds new life” Nikkei Asian Review. Accessed May 25, 2019. https://asia.nikkei.com/Business/Companies/Honda-s-Asimo-robot-bows-out-but-finds-new-life
Haraway, Donna J. 1991. Simians, Cyborgs and Women: The Reinvention of Nature. New York: Routledge.
–––. 2004. Haraway Reader. New York and London: Routledge.
–––. 2011. “Pilgrim Award Acceptance Comments.” Accessed December 13, 2018. http://people.ucsc.edu/~haraway/Files/PilgrimAcceptanceHaraway.pdf.
–––. 2016. Staying with the Trouble: Making Kin in the Chthuluscene. Durham and London: Duke University Press.
Hiroshi Ishiguro Laboratories. n.d. “Robots.” Accessed January 12, 2019. http://www.geminoid.jp/en/robots.html
Honda Corp. n.d. “ASIMO.” Accessed January 12, 2019. http://asimo.honda.com/
Ishiguro, Hiroshi. 2009. Robotto wa Nani ka? Hito no Kokoro wo Utsusu Kagami [What is a Robot? A Mirror that Reflects the Heart of Human.] Tokyo: Kōdansha.
Ishiguro, Hiroshi and Rue Ikeya. 2010. Robotto wa Namida wo Nagasu ka: Eiga to Genjitsu no Hazama [Do Robots Shed Tears? The Gap Between Films and Reality.] Tokyo: PHP Science World.
Ishiguro, Hiroshi, Minoru Asada, Nobuo Yamato. 2007. Hajimete no Robotto Kōgaku: Seisaku wo Tsūjite Manabu Kiso to Ōyō [First Steps to Robotics: Learning Fundamentals and Applications through Making.] Tokyo: Ohmsha.
Jasanoff, Sheila. 2004. “The Idiom of Co-production.” In States of Knowledge: The Co-production of Science and Social Order, edited by Sheila Jasanoff, 1–12. London and New York: Routledge.
Jasanoff, Sheila and Sang-Hyun Kim. 2009. “Containing the Atom: Sociotechnical Imaginaries and Nuclear Regulation in the U.S. and South Korea.” Minerva 47(2):119–46.
Jasanoff, Sheila and Sang-Hyun Kim, eds. 2015. Dreamscapes of Modernity: Sociotechnical Imaginaries and the Fabrication of Power. Chicago and London: University of Chicago Press.
Kaminka, Gal A., Rachel Spokoini-Stern, Yaniv Amir, Noa Agmon and Ido Bachelet. 2017. “Molecular Robots Obeying Asimov’s Three Laws of Robotics.” Artificial Life 23(3): 343–350.
Katō Ichirō. 1988. Ningen Kōgaku: Kōgakuteki Ningengaku [Ergonomics [Human Engineering]: An Engineering Approach to Philosophical Anthropology] Tokyo: Hōsō Daigaku Kyōzai.
Kawashima, Kenji and Kōtarō Tadano. 2014. Etokide Wakaru Robotto Kōgaku [Illustrated Robotics.] 2nd Edition. Tokyo: Ohmsha.
Kemiksiz, Asli. 2011. “The Boundary Between Human and Machine in Science Fiction.” M.A. thesis, Istanbul Bilgi University, Institute of Social Sciences.
–––. 2016. “Science Fiction and Technology: Performativity in the Emergence of the Japanese Humanoid Robot.” M.A. thesis. Osaka University Graduate School of Human Sciences.
–––. 2019. “Modeled After Life Forms: Embodiment and Ways of Being an Intelligent Robot.” Japanese Review of Cultural Anthropology 19(1): 51–81.
Kirby, David A. 2003. “Scientists on the set: science consultants and the communication of science in visual fiction.” Social Understanding of Science 12: 261–278.
–––. 2010. “The Future is Now: Diegetic Prototype and the Role of Popular Films in Generating Real-world Technological Development.” Social Studies of Science 40(1): 47–70.
Kubo, Akinori. 2015. Robotto no Jinruigaku [Anthropology of Robots.] Kyoto: Sekaishisōsha.
Latour, Bruno. 1988. The Pasteurization of France. Cambridge and London: Harvard University Press.
Lem, Stanisław. 1971. “Robots in Science Fiction.” In SF: The Other Side of Realism, edited by Thomas D. Clareson, 307–32. Bowling Green, OH: Bowling Green University Popular Press.
Marcus, George E., ed. 1995. Technoscientific Imaginaries: Conversations, Profiles, and Memoirs. Chicago and London: University of Chicago Press.
McCauley, Lee. 2007. “The Frankenstein Complex and Asimov’s Three Laws.” Accessed January 12, 2019. http://www.aaai.org/Papers/Workshops/2007/WS-07-07/WS07-07-003.pdf
Miraikan, National Museum of Emerging Science and Innovation. n.d.a. “Science Communicators’ Room.” Accessed January 12, 2019. https://www.miraikan.jst.go.jp/en/online/communication/
–––. n.d.b. “ASIMO.” Accessed January 12, 2019. https://www.miraikan.jst.go.jp/en/online/communication/profile/asimo.html?width=560&height=460
Moriyama, Kazumichi. 2014. “Robotto Apuri no Mirai wo Ōpun Komyunithi ni Kakeru Sofutobanku”[Softbank Wagers the Future of Robot Applications on the Open Community.] PC Watch.Accessed January 12, 2019. https://pc.watch.impress.co.jp/docs/column/kyokai/668070.html
Mushi Purodakushon shiryōshū1962–1973 [Mushi Productions’ data file, 1962–73]. 1977. Tokyo: Mushi Purodakushon shiryōshū henshūshitsu.
Ōsawa, Hirotaka (@hiroosa). 2017. Twitter Post. May 31, 2017, 6:34 pm. https://twitter.com/hiroosa/status/869849496045338624
PESTI. 2015. “Robotto mo Yatte Kuru! ‘Robotto x Mirai x Yume Bijon’ Shinpojiumu” [Robots are Coming! “Robots x Future x Dream Vision” Symposium.] Accessed January 12, 2019. http://interactive.pesti.jp/robot/wp/wp-content/uploads/F01_Introduction.pdf
Pfeifer, Rolf and Christian Scheier. 1999. Understanding Intelligence. Cambridge, MA and London: The MIT Press.
Pfeifer, Rolf and Josh Bongard. 2007. How the Body Shapes the Way We Think: A New View of Intelligence. Cambridge, MA and London: The MIT Press.
Robertson, Jennifer. 2018. Robo Sapiens Japanicus: Robots, Gender, Family, and the Japanese Nation. Oakland, California: University of California Press.
Schodt, Frederik L. 1990. Inside the Robot Kingdom: Japan, Mechatronics and the Upcoming Robotopia. Tokyo: Kodansha.
SoftBank Corp. 2015. “Seihin Shiyou”[Product Specs.]Accessed January 12, 2019. http://www.softbank.jp/robot/consumer/products/spec/
–––. 2019. “Shōhyō, Chosakubutsu, Pepper kyarakutā ni kansuru gaidorain hosoku shiryō” [Trademark/Written document: Supplemental Document to the Pepper Character Guidelines.]Accessed January 12, 2019. https://cdn.softbank.jp/mobile/set/data/static/robot/legal/pepper_character_guideline_supplement.pdf
Softbank Robotics. n.d. “Pepper.” Accessed January 12, 2019. https://www.softbankrobotics.com/emea/en/pepper
Stengers, Isabelle. 2018. “Science Fiction to Science Studies.” In The Cambridge Companion to Literature and Science, edited by Steven Meyer, 25–45. Cambridge: Cambridge University Press.
–––. 2019. “Reclaiming Imagination: Speculative SF as an Art of Consequences. An interview with Isabelle Stengers.” Interview by Casper Bruun Jensen and Line Marie Thorsen. NatureCulture. Accessed May 12, 2019. https://www.natcult.net/interviews/reclaiming-imaginationspeculative-sf-as-an-art-of-consequences/
Strathern, Marilyn. 1992. Reproducing the Future: Essays on Anthropology, Kinship and New Reproductive Technologies. Manchester: Manchester University Press.
Suidōbashi Heavy Industries. n.d. Suidōbashi Heavy Industries website. Accessed January 12, 2019. http://suidobashijuko.jp/
Takeno, Junichi. 2013. Creation of a Conscious Robot: Mirror Image Recognition and Self Awareness. Boca Raton, Florida: CRC Press.
Tanaka, Satoshi. 2014. “Son-shi: ‘Saishūtekini Ai wo Rikai Saretai’ Sofutobanku ga Hitogata Robotto ‘Peppā’ de Mezasumono” [Son: “Eventually I want them to understand love” – What Softbank Aims with the Humanoid Robot ‘Pepper’] ITMedia. Accessed January 12, 2019. https://www.itmedia.co.jp/mobile/articles/1406/05/news157.html
Vanderelst, Dieter and Alan Winfield. 2017. “An architecture for ethical robots inspired by the simulation theory of cognition.” Cognitive Systems Research 48: 56–66.
Vincent, James. 2018. “Pioneering creator of collaborative ‘cobots’ Rethink Robotics shuts down.” The Verge.Accessed May 12, 2019. https://www.theverge.com/2018/10/4/17935820/rethink-robotics-shuts-down-baxter-sawyer-robot-cobots
White, Daniel. 2018. “Contemplating the Robotic Embrace: Introspection for Affective Anthropology.” NatureCulture. Accessed May 12, 2019. https://www.natcult.net/contemplating-the-robotic-embrace/